
Harry Boyd
ENGINEERING PORTFOLIO

Hi, I’m Harry,
an Electronic Engineer passionate about creating innovative solutions.
This portfolio showcases some of my recent work in electronics design, embedded systems, and hardware/software integration. Each project highlights a practical approach to an engineering challenge, emphasising problem-solving, prototyping, and testing. Together, these examples demonstrate my commitment to developing efficient, effective, and pragmatic solutions, supported by clear technical communication.
Core Strengths
- PCB design and schematic capture (KiCad, Altium)
- Embedded programming (C, C++)
- Rapid prototyping, data processing, and hardware testing (Python)
- Hardware/software integration and debugging
- CAD modelling for enclosures and mounting solutions (Autodesk Inventor, Onshape)
- Prototyping, testing, and validation of electronic systems
- Clear technical documentation and communication
Project Overviews
Project G.E.S.T.U.R.E.
A hand gesture-controlled robot.
Project A.L.I.E.N.
A maze-solving robot using Dijkstra’s algorithm.
Soldering Workshop
A workshop I led teaching safe soldering techniques to beginners.
NES Controller Breakout Board
A hardware adapter for the Nintendo Entertainment System controller.
Project G.E.S.T.U.R.E.
(Gesture Enabled Surface Traversal using Real-time Engagement)
Overview
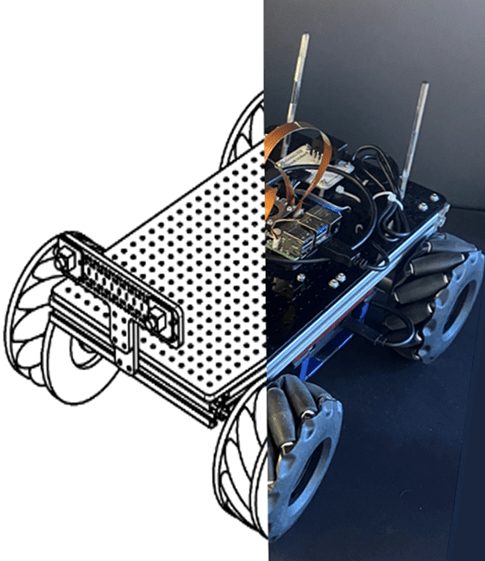
This project, developed for my Master’s degree dissertation, introduces a novel control method for mobile robots. Instead of relying on a physical controller, the system interprets hand gestures and calculates the position of the user’s hand in 3D space.

Objectives
- Develop and implement mobile robot chassis.
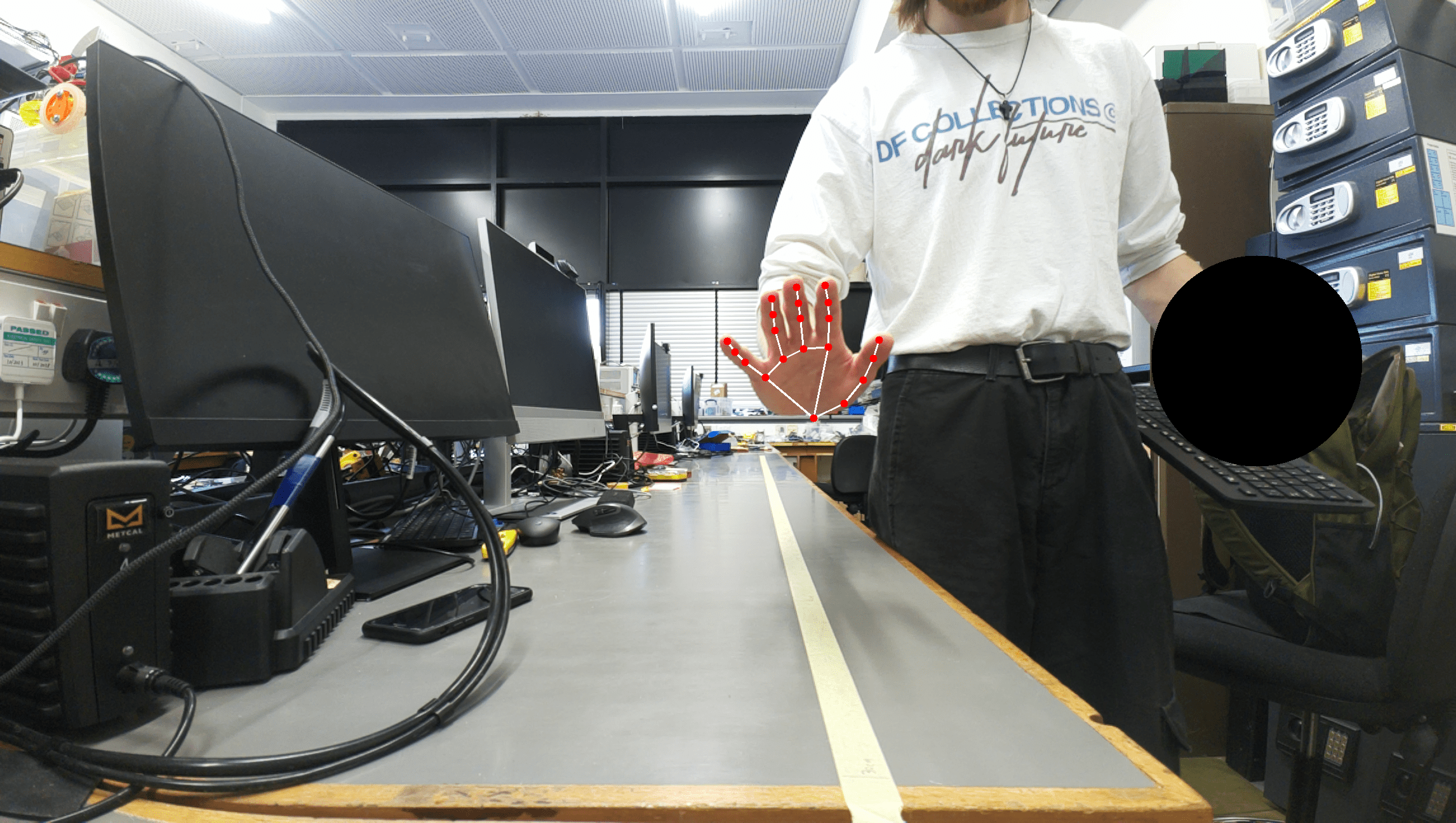
- Integrate Google’s MediaPipe pipeline to recognise and categorise hand gestures.
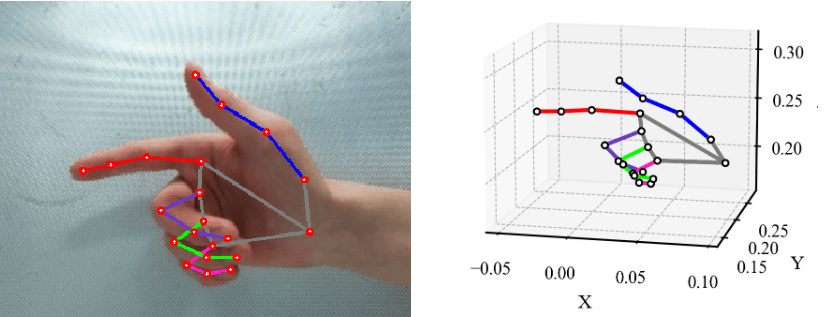
- Localise the position of the user’s hand, using stereo vision, and the location they are pointing towards.
- Ensure the system runs on a single-board computer without cloud processing or external sensors.
My Contributions
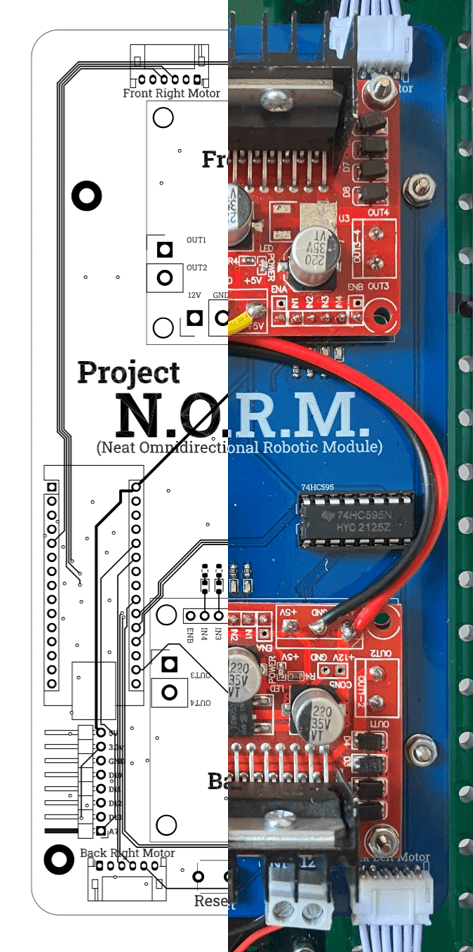
- Electronics & Hardware: Designed a custom PCB in KiCad to integrate stereo cameras with processing hardware, and developed CAD models in Autodesk Inventor to create robust mounting solutions that ensured mechanical stability and simplified assembly.
- Embedded Systems & Software: Implemented stereo vision and gesture recognition pipelines on a Raspberry Pi using Python, OpenCV, and MediaPipe. Programmed a microcontroller and implemented a custom communication method allowing the Python program to control the motors, enabling seamless hardware/software integration.
- Testing & Debugging: Built and assembled prototypes, conducted performance testing (robustness and FPS), and debugged hardware/software bottlenecks.
- Pipeline Optimisation: Developed and optimised a system that combines MediaPipe Holistic and MediaPipe Hands, improving robustness by digitally zooming on regions of interest while maintaining efficiency, enabling reliable hand detection at longer ranges with minimal performance loss.
Results
- Delivered a system capable of tracking and following the user’s hand.
- Delivered a system capable of categorising hand gestures.
- Optimised the gesture recognition pipeline to allow for better computational efficiency and robustness compared to Google’s off-the-shelf pipeline.
- Provided insights into how landmark-based stereo vision systems can be tuned for both accuracy and efficiency in real-time applications.
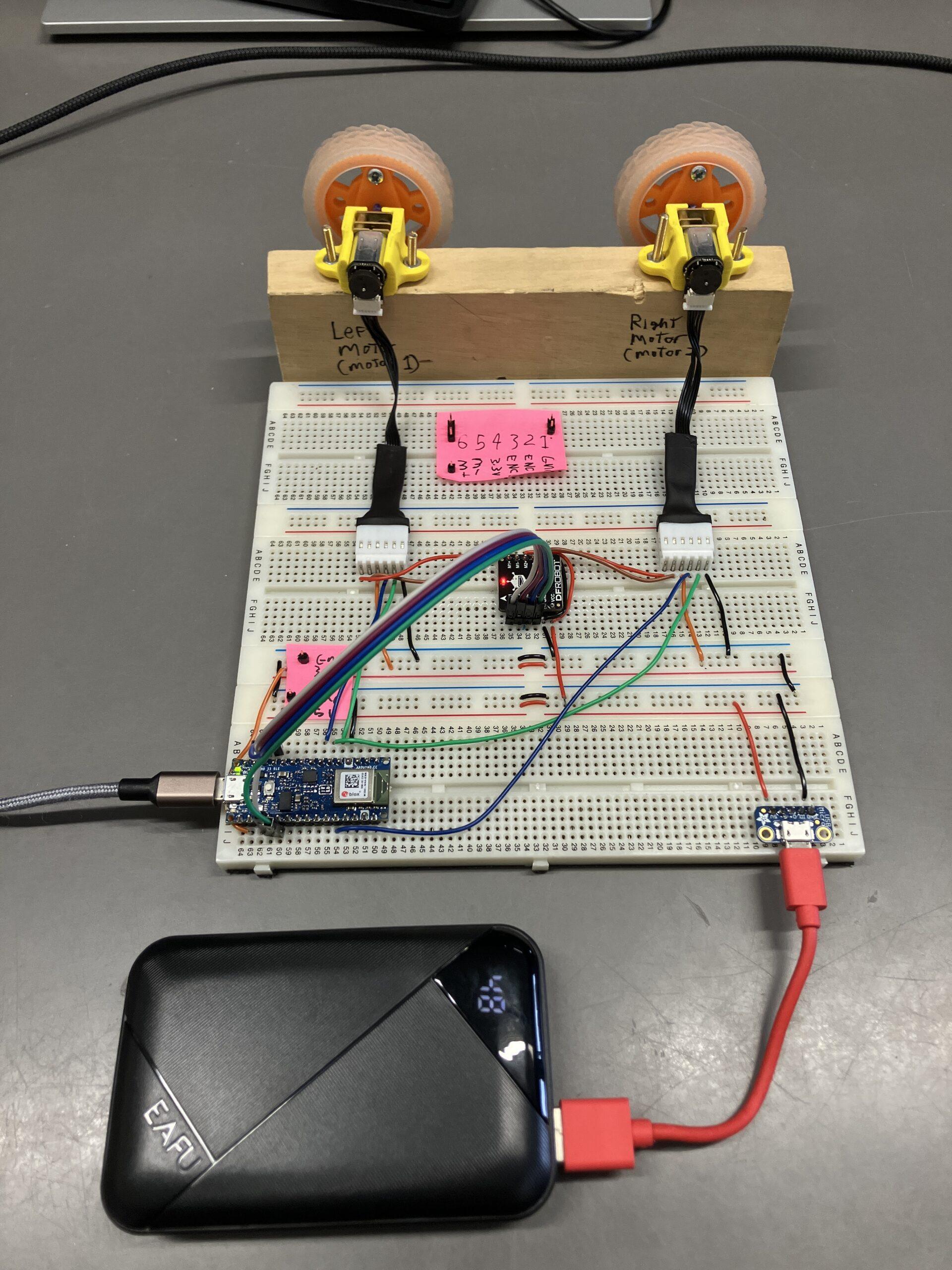
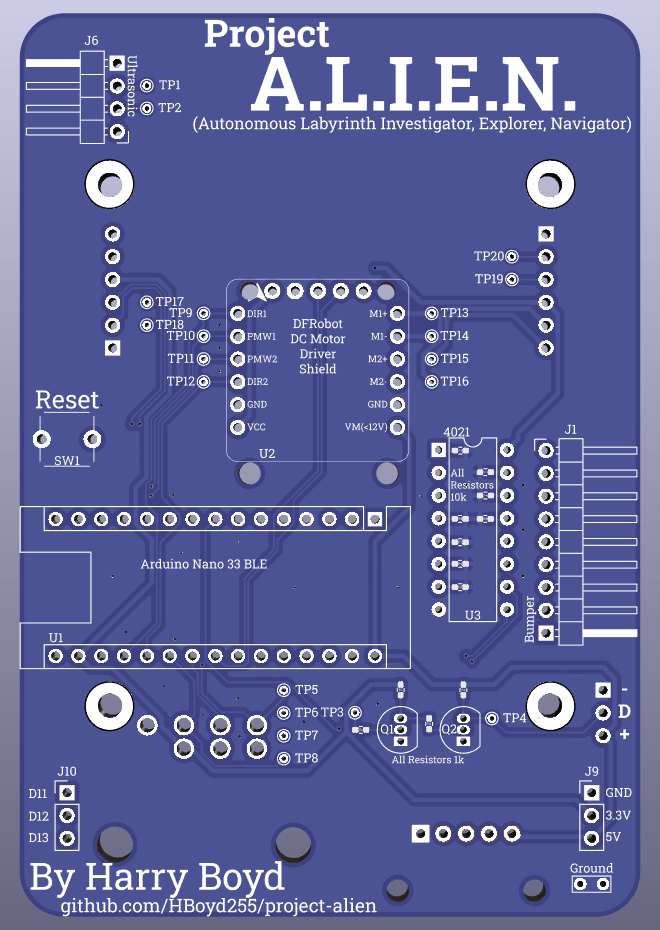
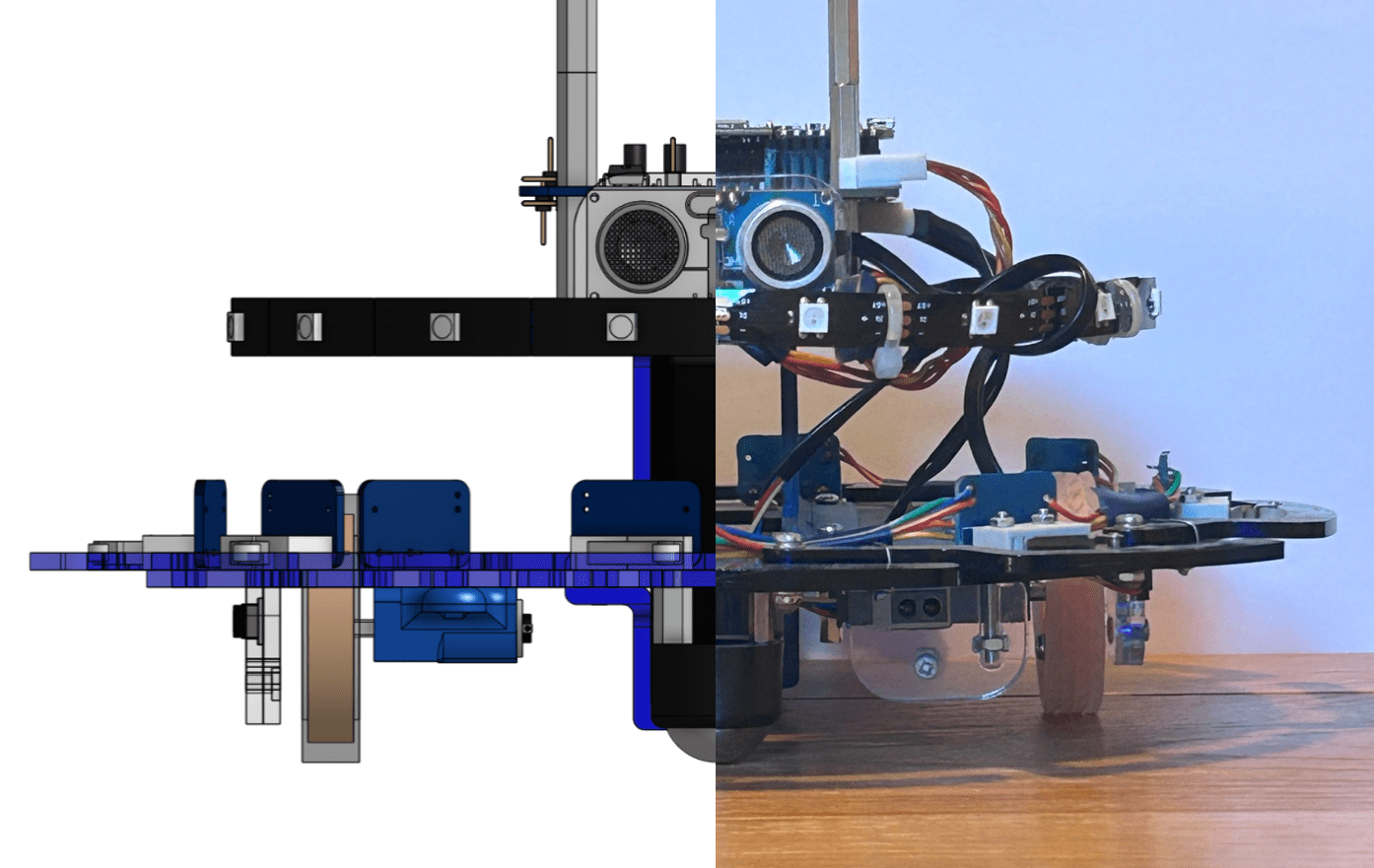
Project A.L.I.E.N.
(Autonomous Labyrinth Investigator, Explorer, Navigator)
Overview
During my time at York, I developed an autonomous robot capable of solving a maze. I worked independently over a 10 week period, designing and manufacturing both hardware and software, while managing the project timeline. After a live demonstration, I presented and defended my design decisions.

Objectives
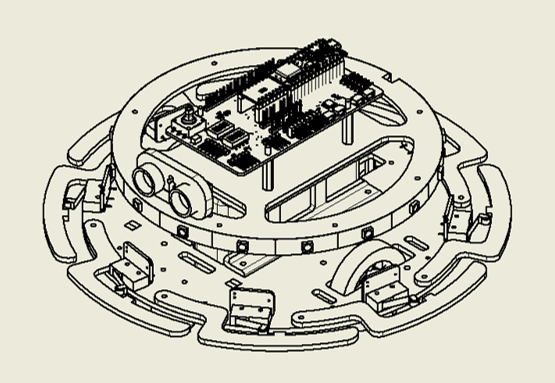
- Design a robot base using CAD, combining laser cutting, 3D printing, and PCB fabrication.
- Apply engineering knowledge to select and justify sensor choices (ultrasonic, infrared).
- Use mathematical reasoning to evaluate and justify a shortest-path algorithm.
- Identify and mitigate risks through test-driven development.
My Contributions
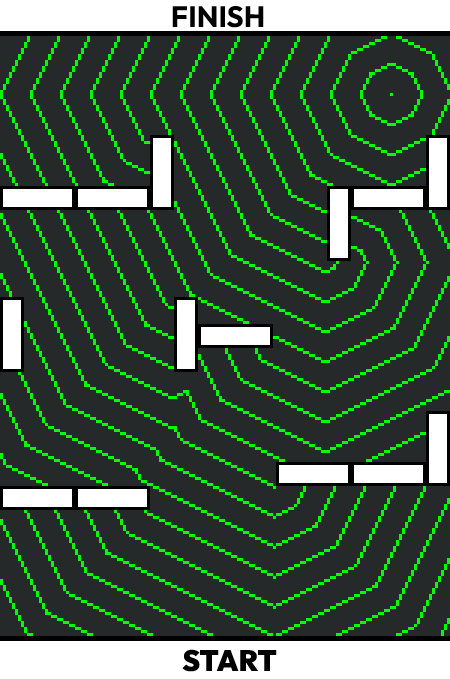
- Algorithms & Navigation: Selected Dijkstra’s algorithm over A* to compute shortest paths to all grid cells in a single run, enabling the use of a policy map for efficient navigation.
- Hardware Design & Integration: Designed a custom PCB using KiCad to interface sensors, processing units, and motors. Developed CAD models in Autodesk Inventor for enclosures and mounts, ensuring durability and ease of assembly.
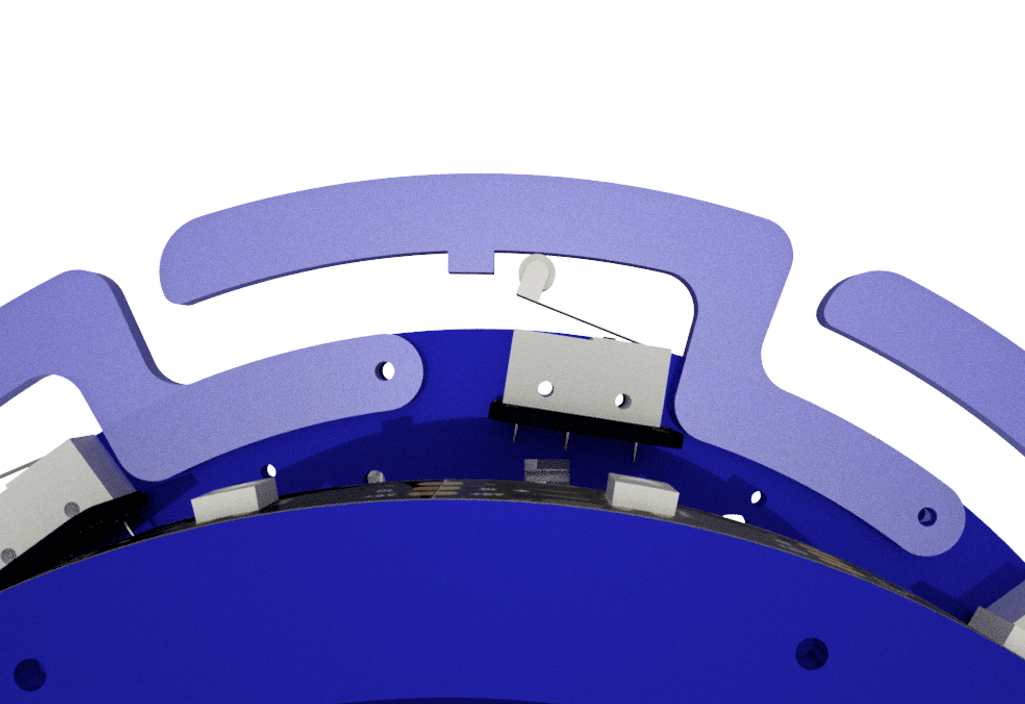
- Sensing & Collision Avoidance: Identified sensor blind spots that led to occasional corner collisions and implemented a bumper system for collision detection and recovery.
- Testing & Debugging: Conducted extensive hardware calibration and testing to ensure reliable odometry. Developed an external Bluetooth debugging client to streamline software troubleshooting.
Results
- The robot successfully mapped obstacles while traversing the maze and used a policy map derived from Dijkstra’s algorithm to return via the most efficient route.
- Achieved a grade of 95% for the module.
- Due to the success of the project, I was invited to present the project to the following year’s cohort.
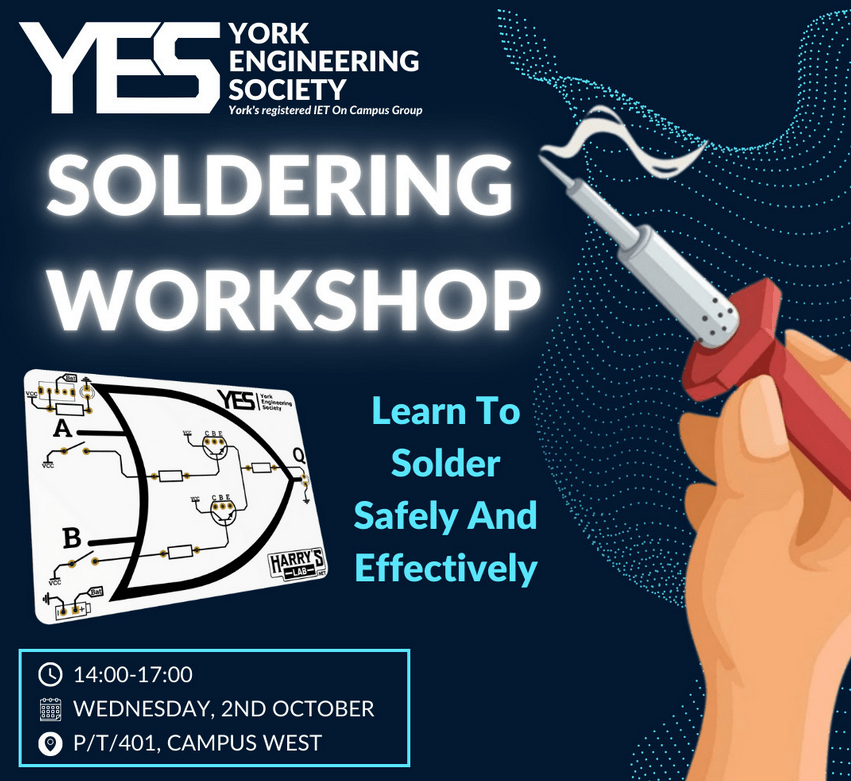
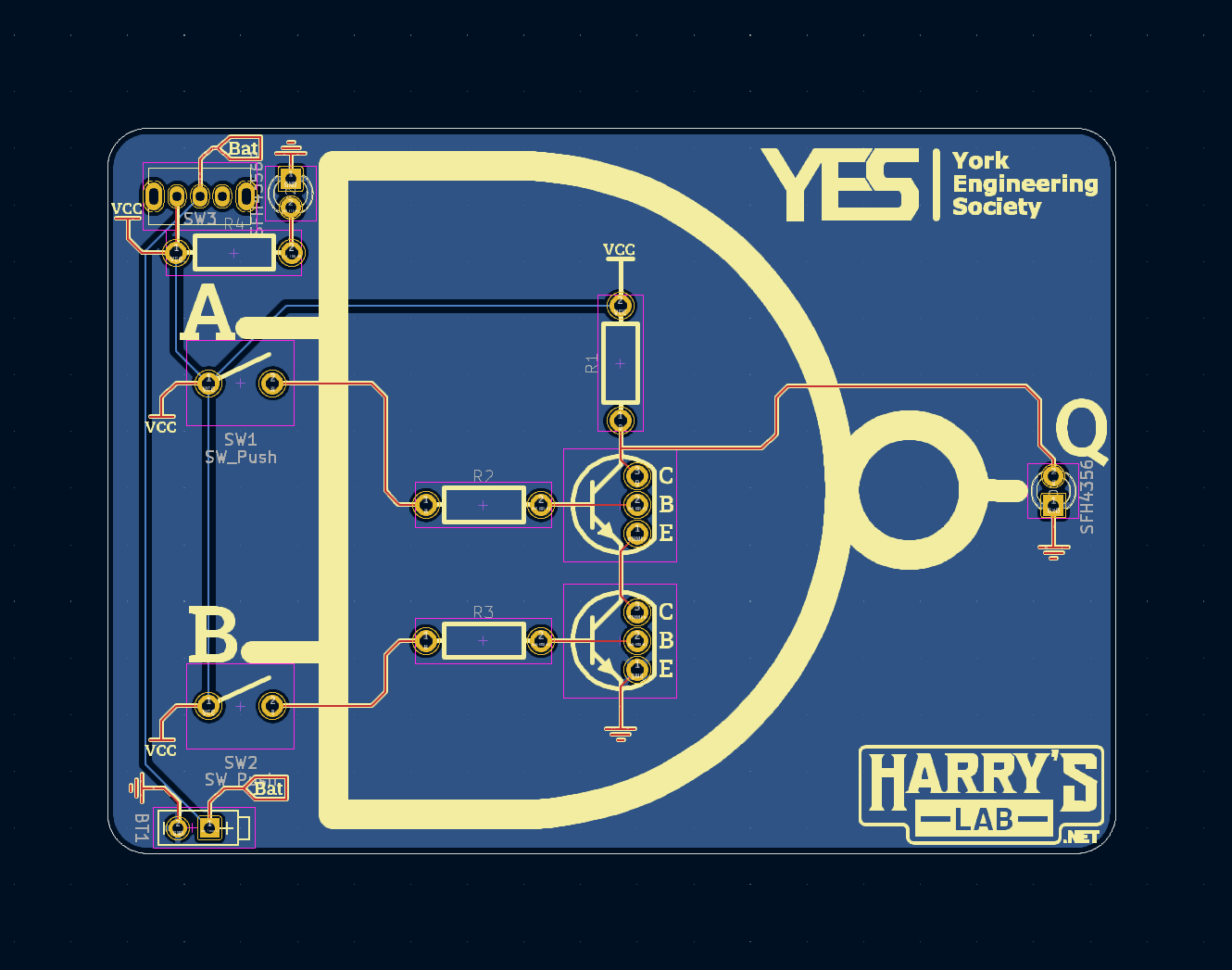
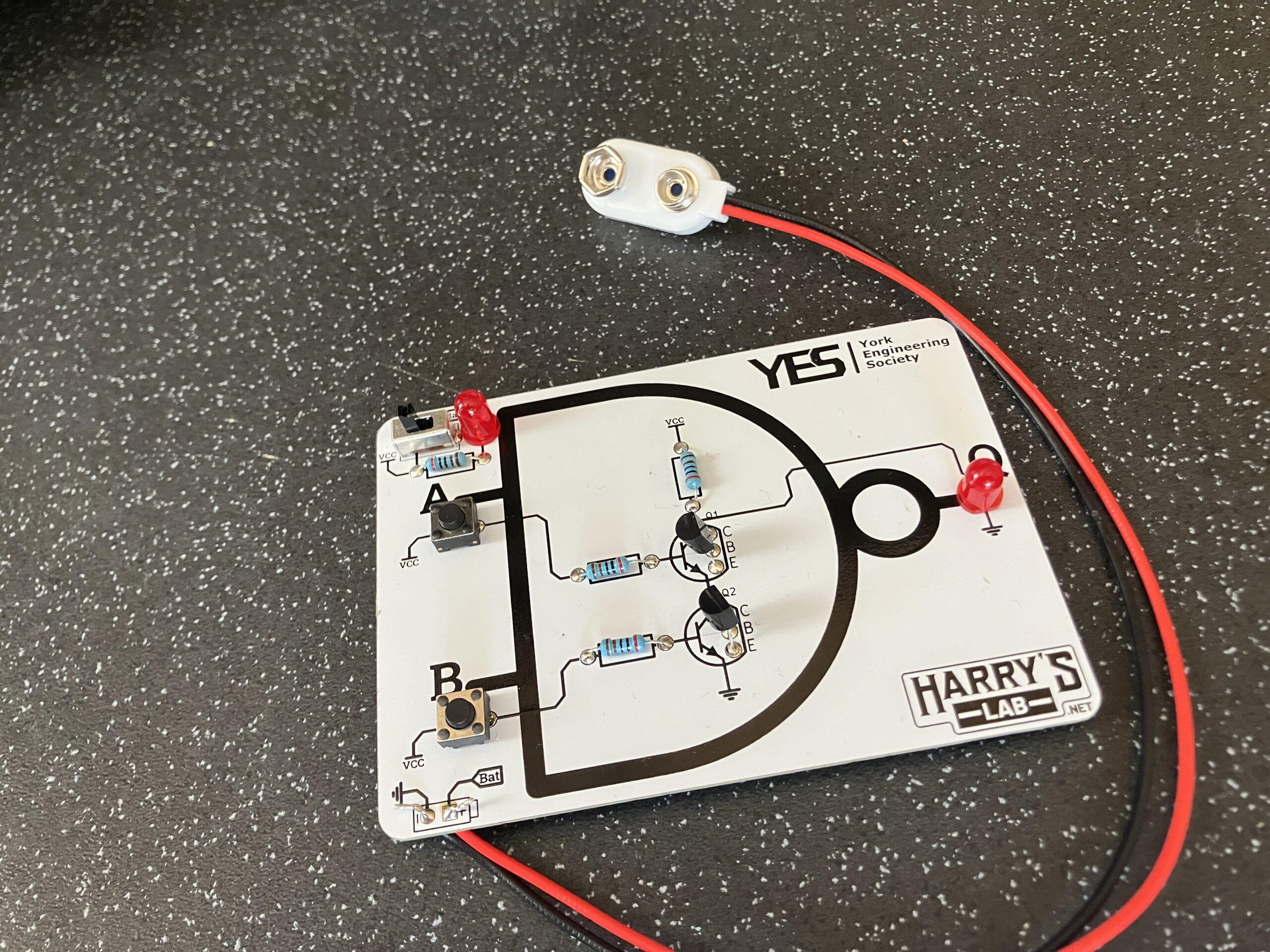
Soldering Workshop
Overview
As part of my role on the committee for the York Engineering Society, I designed and delivered a practical workshop to teach introductory soldering techniques. The session was aimed at giving students hands-on experience with through-hole components and basic circuit assembly.
Objective
To develop a beginner-friendly soldering kit and run a workshop that introduced students to electronics assembly through a simple, engaging project.
My Contributions
- PCB Design: Developed and produced custom soldering kits featuring a logic circuit with through-hole components.
- Workshop Delivery: Planned and ran the workshop, demonstrating correct soldering techniques and providing one-to-one guidance to participants.
- Organisation: Managed logistics, including sourcing components, preparing materials, and ensuring a safe and accessible learning environment.
Results
- The workshop reached full capacity and was later repeated due to high demand.
- Received positive feedback from attendees, many of whom built their first functional electronic circuit during the session.
- Contributed to increasing engagement in society activities and building interest in practical electronics among students.
NES Controller Breakout Board
Overview
While working on various embedded systems, I often needed a simple input controller for debugging and testing. To meet this need, I developed an interface that allows a classic NES controller to connect directly to the common header pins found on many microcontroller development boards.
Objectives
- Design a compact and reusable PCB that interfaces the NES controller’s 4021 shift register with common development boards.
- Develop a user-friendly Arduino library to convert the shift register’s signals into digital button inputs, compatible with both Arduino and PlatformIO development environments.


My Contributions
- PCB Design & Fabrication: Created a custom PCB to expose the NES controller signals via standard 0.1-inch headers for easy connection to microcontrollers.
- Library Development: Wrote an Arduino/PlatformIO library to read the 4021 shift register and provide simple functions to access button states.
- Prototyping & Testing: Assembled the PCB, tested the hardware, and verified the library across multiple microcontroller platforms for reliable operation.
- Compliance Considerations: Selected RoHS-compliant components to ensure the breakout boards could be safely manufactured and sold.
Results
- Produced a fully functional, reusable interface for NES controllers, improving efficiency in debugging and testing embedded systems.
- Combined hardware and software design into a compact tool, demonstrating practical embedded engineering skills.
- Ensured regulatory compliance (RoHS) for potential commercial use, enabling low-cost, safe distribution.
Thank you,
for taking the time to read my portfolio. I’m eager to take on new challenges and contribute to innovative projects, so if my skills and experience align with your needs, I’d be glad to connect.